Peo
-
Posts
733 -
Joined
-
Last visited
-
Days Won
37
Content Type
Profiles
Forums
Events
Everything posted by Peo
-
@LPL jag ser på din bild att du har en HoloAudio May DAC KTE. Det var ett mindre syskon till den som jag blev så förälskad i, en HoloAudio Spring 3 KTE.
-
En liten fråga bara: Har ni separat spänningsmatning till era digitala burkar? I mitt fall gäller det en streamer (Lumin), en switch (EE8) och eventuellt DAC'en. Båda Streamer och switch är ju helt i den digitala domänen och jag är väldigt tveksam till att blanda dem med analoga apparater. DAC'en tillhör båda världarna, eftersom den har en analogdel så har den hittills fått "finström". Vad gäller dator, TV, TV-box, skivspelarens motorstyrning, LED-lampor och liknande råder det ingen tvekan, de har inte att göra på hifi-matningen. Bilden nedan visar hur min 230V-försörjning ser ut i dag. Jag har alltså två matningar, en med "finström" till de analoga burkarna och en mer allmän matning försedd med en s.k. strömrenare för skitgrisarna. Strömrenaren är inte primärt avsedd för att snygga till "strömmen" till dessa prylar, utan för att förhindra att de sprider skit tillbaka till centralen. Båda matningarna ligger givetvis på samma fas och den vill jag hålla så ren som möjligt. Min första tanke var att både streamer och switch hör hemma på den "skitiga" matningen, men sen läste jag att en streamer presterar bättre med "finström". Är det någon som har några erfarenheter att dela med sig av i den frågan? Ett alternativ är att mata switchen (och dess SMPS) med "fulström" och Lumin med sin LPS (SBooster) med "finström". Det finns ett ledigt uttag i min Thor, men den operationen är inte så lätt att testa som det låter, jag kommer inte ut baksidan på Thor'en utan att tömma halva bänken på prylar, bl.a. skivspelaren.

-
Nu har även jag blivit med streamer och valet föll på en LUMIN U2 Mini (med en SBooster PSU). Min välutvecklade SMPS-allergi/fobi (f.f.a. i hifi-sammanhang) var en bidragande orsak till att jag valde en som var ombyggd till LPS. Streamern levererades alltså med SBooster och jag kan därför inte svara på om den gör någon skillnad, eller inte. Det blir åtminstone lugnt i själen med den här lösningen. Jaha, jag bytte alltså ut en simpel Raspberry Pi4 (med Ropieee XL) som spelare, mot en LUMIN U2 Mini, blev det "så mycket bättre" då? Både ja och nej, visst finns det klart hörbara skillnader på viss musik, men samtidigt kan jag inte med säkerhet avgöra om det är Lumin eller RPI'n som står för signalen med ett annat musikval. I huvudsak kommer Lumin att användas för avspelning av lokalt lagrade flac- och DSD-filer, men jag har ju också fått möjlighet att använda Tidal eller Qobuz om jag vill. Nyfiken som jag är så krokade jag på ett 30-dagars testabonnemang hos Qobuz, men jag blir inte riktigt kompis med varken deras egna gränssnitt eller via Lumins app. Jag får väl testa om jag gillar Tidals gränssnitt bättre, de har väl också prova på-abonnemang. Lumin-appen och jag var inte heller speciellt bra kompisar i början, men efter några timmars utbildning av @Bebop (stort tack för hjälpen) så går det nu riktigt bra och appen växer för var dags användning. Jag föredrar dock att presentera min egna musik via "folder view" istället för via Lumins koncept, jag kan då själv bestämma hur det ska visas genom att göra mina personliga inställningar i Minimserver. Utan hjälp från @AlfaGTV hade jag aldrig lyckats konfigurera Minimservern så att det hade fungerat som jag ville ha det. (1k tack för supporten) DACen är fortfarande en Denafripps Ares II och den har klarat sig bra genom ett flertal jämförande tester mot andra DACar (av varierande dignitet). Det är egentligen bara en enda DAC hittills som har piskat den med tillräckligt god marginal för att locka till en uppgradering. Jag gillade verkligen det jag hörde och för första gången var skillnaden inte bara marginell gentemot Ares II. Dyker det upp en sådan på begagnatmarknaden så kommer jag nog att få svårt att hejda mig, vill ha! När frugan och barnbarnen lärt sig att använda Lumin-appen så ryker både CD-spelaren och CD-skivorna. Mina skivor är redan rippade och det här konceptet låter inte sämre än CD-spelaren, så varför ska den då vara kvar? En ny NAS (till musiken och till Minimservern) är på gång, men jag har lite svårt att bestämma mig för om jag ska bestycka den med SSD eller med "snurrediskar". I dagsläget klarar jag mig med 2TB till musik-filerna, men man vill ju helst ha lite att växa i. Tyvärr är SSD fortfarande ganska dyrt/TB. Jag har en trött gammal 4x4TB (raid 5) NAS för den "vanliga" fillagringen (och ännu så länge för musik + Minimserver), samt en liten (1x1TB SSD) NAS (med inbyggd SQL-server) för min vinyldatabas. Jag gillar att ha dedicerade system till respektive uppgift och därför får det bli en egen NAS till musiken. Anläggningen ser i stort ut som innan, inga andra nya prylar. Pickupen är nu garanterat inspelad (150h) och den låter helt fantastiskt, mycket bättre än vad den gamla gjorde (i.a.f. som jag mins den). (Inställningen av den nya pickupen är förvisso lite noggrannare utförd än på den gamla, men jag tror att den gamla var slutkörd) Jag har tvingats byta fas till anläggningen. Jag är bortskämd med en helt tyst (kolsvart) bakgrund och helt plötsligt så var det inte så längre. Jag såg på mina mätningar att något hade hänt, 3:e och 5:e överton hade ökat från 1,1% resp. 0,6% till 2,7% resp. 1,9%, den 11:e och den 15:e övertonen hade också dykt upp och de har inte funnits där tidigare. Nu är det troligtvis inte övertonerna i sig som ställer till det (de är snarare bara en symtom, ungefär som feber), men de är en bra indikation. Någonting i omgivningen hade alltså börjat skicka ut "skit" på den fasen jag använde (L3). Jag mätte upp att L2 nu var den "renaste" fasen och efter lite omflyttningar i centralen så var det lugn och ro igen. Lätt fixat. (L2 ger ungefär samma värden som L3 gjorde innan, lite mer av den 6:e övertonen, men det är försumbart lite och orsakar bara några få mV DC) Vad som orsakar "slasket" på L3 vet jag inte med säkerhet, men jag har mina misstankar. Det är ovanligt mycket störningar i området 5-15kHz vilket tyder på en modern laddare. Jag tänker inte jaga "skitgrisen" i dagsläget, jag är nöjd med att den inte skitade ner alla tre faserna. Jag önskar er alla en skön sommar, så hörs vi kanske till hösten.


- 450 replies
-
- 16
-

-

-
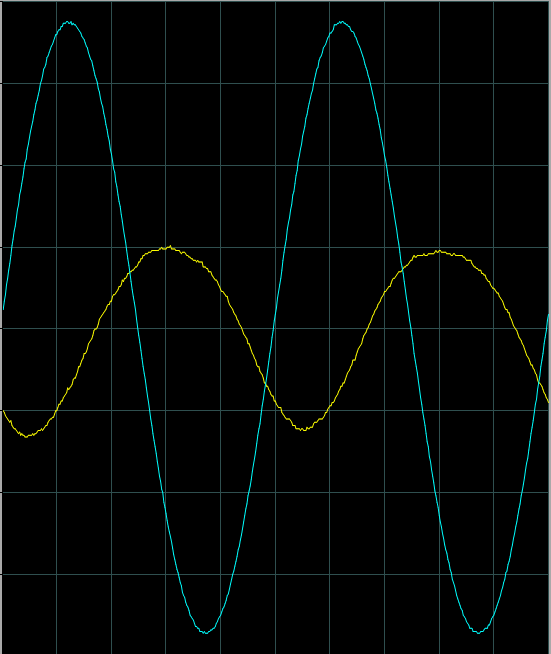
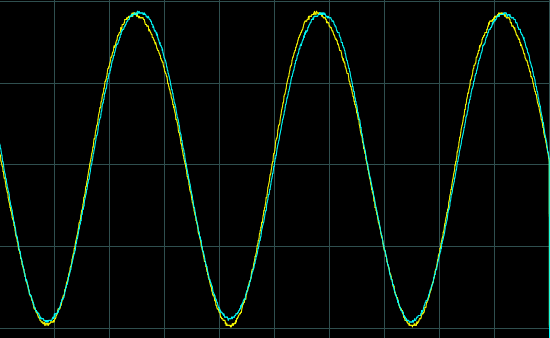
Jag ska börja mitt svar med en förklaring av min tidigare text. Jag valde att presentera resultatet som ° för att inte blanda in för många enheter, men egentligen är det ett tidsfel. 2,8° vid 10kHz motsvarar ett tidsfel på 0,7uS och jag har valt att använda 10kHz-spåret dels för att det ligger rätt enligt min geometri , men även för att det är svårare att avläsa ett 0,7uS tidsfel vid lägre frekvenser. Vid 10kHz syns det tydligt på ett oscilloskop, även vid en vettig tidbas. Bilden nedan visar en 5uS tidsförskjutning på en 1kHz signal. Målet med mina övningar (förutom att få pickupen så bra inställd som möjligt) är att hitta metoder där man med ett enkelt (och billigt) oscilloskop och en standard testskiva (som många redan har) ska kunna göra detta själv utan några speciella färdigheter. Mer om detta lite senare. Om jag räknar rätt så krävs det en samplingshastighet på 1430Khz sample rate för att överhuvudtaget kunna detektera 0,7uS
-
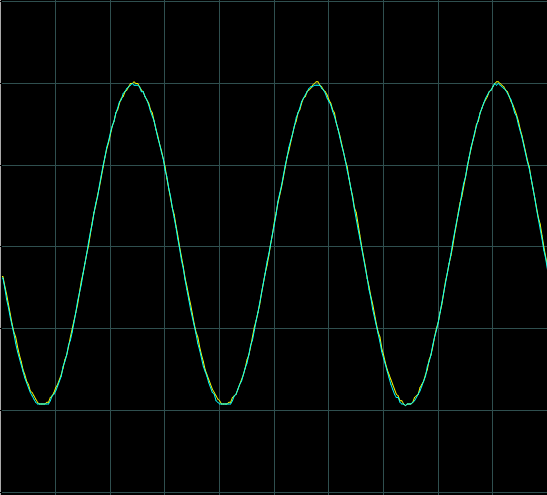
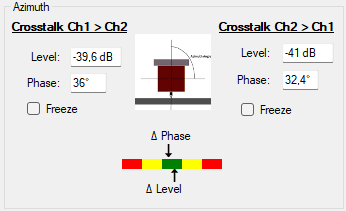
Speltiden på pickupen har passerat 50 timmar och det är dags att kolla så inget har förändrats under inspelning. Jag börjar som vanligt med det viktigaste: Står spelaren i våg? Check, ingen åtgärd. Med hjälp av en Dr. Feickert Protractor NG kollas överhänget: Check, ingen åtgärd. Med en våg (med rätt mäthöjd) kollas VTF: Check, ingen åtgärd. Nästa kontroll blir Zenith: Pickupen står exakt som jag lämnade den, det finns fortfarande ett litet tidsfel (fasfel) mellan kanalerna Efter grundmontaget med protraktorn var zenith-felet oacceptabelt stort så det fick efterjusteras, men jag spände inte bågen fullt ut när jag gjorde den förra finjusteringen eftersom jag visste att jag skulle på det igen om några veckor. Felet som jag lämnade är inte så stort att det äventyrar något, men nu kommer jag att åtgärda det så bra jag förmår. Att ställa in zenith med en protraktor är som att göra framvagnsintällning på bilen relativt karossen. Är bilen absolut rak (och står rakt) så kan det bli bra. På Amazonens tid gjorde man det själv hemma på garageuppfarten med en kartongbit, ett snöre med en mutter som lod och en tumstock. Om bilen höll sig kvar på vägen när man släppte ratten så hade man lyckats, men samtidigt är det rätt stor skillnad på en modern bils krav relativt en VW bubbla. Jag tror inte att någon modern bilmekaniker skulle nöja sig med det resultatet. I dag används avancerad lasermätning. Antiskating: Som innan. Check! Azimuth: Det är faktiskt lite mindre crosstalk nu än än vid montaget, men samtidigt har skillnaden mellan kanalernas crosstalknivå ökat lite. Något händer helt klart med pickupen under inspelningen. Även detta kommer att behöva justeras. VTA: Ingen mätbar förändring sedan montaget, ingen åtgärd. Check! ------------------------------------- Både min "verktygslåda" för pickupinställning och mina kunskaper om hur jag ska använda den har förbättrats ett par snäpp sedan jag gjorde montaget. Jag hade ju ett litet Zenith-fel från montaget som jag nu rättade till. Jag justerade från 2,8° fasfel till 0,5° Nu börjar det likna något. Att justera bort det sista lilla felet innebär att jag ska lossa ena skruven till pickupen och flytta den ~0,03 mm (eller flytta en skruv 0,015mm framåt och den andra 0,015mm bakåt). Jag fixar inte det utan hjälpmedel, men jag jobbar på en lösning. Egentligen är det bara vid den valda geometrins nollpunkter som Zeinth-felet ska vara 0 och ju närmare 0 man kommer, desto mindre vinkelfel blir det över hela skivan. Jag använder Baerwald-geometrin och där ligger nollpunkterna vid 66,00 resp 120,89 mm från skivcentrum, spåret jag använder för att justera zenith ligger 122 mm från centrum. Vinkelfelet med en 9" arm (enligt Baerwald) är 1,86° vid 1:a spårets början, -1,1° vid skivans mitt och 1,36° vid sista spåret. Ett zenith-fel på +2°, ger istället att det är 3,86° vid 1:a spårets början, 0,9° vid skivans mitt och 3,36° vid sista spåret. Nu finns ingen nollgenomgång längre. En relativt lite feljusterad zenith kan alltså tillföra ett betydligt större vinkelfel än vad en 9" pivot-arm orsakar. Köper man 12-15" armar för att få så litet vinkelfel som möjligt, men inte justerar Zenith korrekt så kanske man inte vinner något alls. Azimuth: Efter lite finjustering fram och tillbaka landade jag på det här: Crosstalk L -> R =-39,6dB Crosstalk R -> L = -41dB En obalans av crosstalk på 1,4dB stör mig lite, jag hade helst sett <1dB, men samtidigt kommer jag att försämra crosstalk för båda kanalerna om jag ska minska obalansen till <1dB. Jag hittade det här läget: Crosstalk L -> R =-35,7dB Crosstalk R -> L = -35,9dB vilket ger en obalans på 0,2dB, men tyvärr högre crosstalk, så jag gick tillbaka till föregående värde, jag föredrar minimal crosstalk. Det är en avvägning där erfarenheten, tycke och smak får avgöra. Alla pickuper är inte lika, inte ens av samma modell. Just detta exemplar av Lyra Kleos har mindre crosstalk än någon annan pickup som jag har testat, det är ytterst sällan jag ser värden som passerar -35dB på båda kanalerna samtidigt. Ljudmässigt kan jag inte höra en obalans på 1,4dB som ligger -40dB under signalen, däremot hör jag om crosstalk ändras från -40dB till -35dB på båda kanalerna. Bilden visar Azimuth-mätning på en kanal: Blå kurva är signalen i vänster kanal och gul kurva är crosstalk i höger kanal. (Mätområdet för signalen (blå) är 2,5V/div och för crosstalk-signalen (gul) 100mV/div) Som synes i bilden ovan är det en fasförskjutning mellan signalen i den blå kanalen och den gula kanalens crosstalk (idealt hade varit 90°). Skillnaden i fasvinkel mellan vänster kanals signal och höger kanals crosstalk relativt fasvinkeln mellan höger kanals signal och vänster kanals crosstalk ska helst ligga så nära varandra som möjligt och nuförtiden försöker jag att trixa in azimuth så att varken nivå- eller vinkel-skillnaden mellan kanalerna blir för dominant. Det är sällan det blir så här bra och går det inte att uppnå det "perfekta" så prioriterar jag kanalbalansen före fasvinklarna. (bilden kommer från mitt hemsnickrade verktyg) Fasvinkeln (Phase) i bilden ovan presenteras som det uppmätta värdet - 90° Så, nu är efterjusteringen gjord och det är dags för en provlyssning. Det här var väl använd tid (ca: 1,5h mät/justering), det låter märkbart bättre nu än innan justering och om inget drastiskt händer (typ ett tonarmsbyte eller att jag kommer på hur jag ska mäta och justera med betydligt högre precision än idag) så kommer antagligen pickupen att sitta som den gör tills den dagen den har gjort sitt. Det är svårt att peka på en enskild parameter som förbättrats, det låter helt enkelt bättre. Jag kommer förvisso att göra en verifieringsmätning igen efter 150-200 timmars speltid, men jag räknar inte med att det ska föranleda någon åtgärd. Lite eftersnack: Jag är fullt medveten om att många tycker mitt förhållningssätt till toanarm/pickupinsällningar har gått fullständigt överstyr och att det hela tog sig närmast absurda proportioner redan för många år sedan. Det är helt upp till er, jag ser det snarare som ett förhållningssätt till hela grejen, inte minst av respekt för både min pickupinvestering och min skivsamling. Hur många gånger har jag inte hört "Varför jagar du decimaler som ändå inte hörs?" Vem säger att det inte hörs? Är 4-5dB att betrakta som decimaler? Inte i min värld. "Är verkligen 0,001 bättre än 0,01 när 0,1 är good enough?" Vem är det som har bestämt att 0,1 är good enough? Vilken agenda, kunskap, utrustning, förmåga o.s.v. hade den personen när han fällde det uttalandet. Är uttalandet ens underbyggt eller är det bara ett utkastat påstående helt utan förankring? Många kläcker ur sig sådana påståenden för att verka vederhäftiga och så länge mottagarens bristande källkritik är som den är (har XX sagt det, så är det så) så kommer de att leva kvar och med tiden tenderar de t.o.m. att bli en oantastlig sanning . Det skiljer en hel del i krav mellan en Shure M75 och en Lyra Kleos och många av dessa "felaktiga" påståenden härstammar från 70 och 80-talet. De är i väldigt många fall inte aktuella längre, men när ingen ifrågasätter relevansen i dem så fortsätter de att vara en sanning. Vad är är good enough när det gäller t.ex. Zenith? Jag vet faktiskt inte, men för varje litet steg som jag lyckas ta mig mot "noll" så hör jag förbättringar och jag anser därför att jag inte ens är i närheten av att veta vad good enough är. Att sedan förutsättningarna för en lyckad Azimuth-justering är helt avhängd på hur bra Zenith är justerad gör ju inte saken mindre komplicerad. Den utrustning jag använder och hur mina mätmetoder ser ut kommer att presenteras någon gång i framtiden, jag är inte klar ännu.



- 450 replies
-
- 16
-
-
-
Har du testat med att skärma rören? Det har löst brummande riaa-steg mer än en gång för min del.
-
Visst är det så, men det är desto svårare att beskriva. Känslor och upplevelser har jag svårt att sätta relevanta ord på.
-
Visst är det så, det har jag konstaterat flera gånger, men allt går inte att tillskriva CAST. Du vet var jag finns.
-
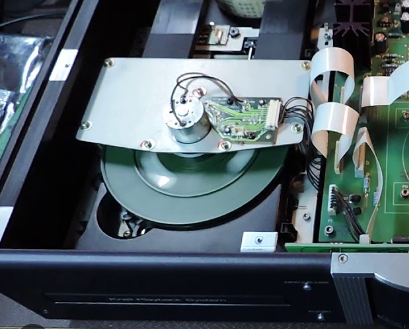
Tveklöst DAC'en, jag har jämfört Krellen med andra spelare via SPDIF och då sticker den inte ut. Det är ett "vanligt" TEAC-verk med några små förändringar. Ja visst är det smidigt, kan inte spelaren presentera det som man vill ha det, så erbjuder Minim2 ganska flexibla möjligheter. Jag har verkligen försökt att hitta något bra i många skivor (det är ofta tips från andra som tycker att det är "såååå bra"), men om de efter 10:e spelningen fortfarande triggar igång mitt flyktbeteende så ger jag upp. Jag är helt enkelt inte mottaglig för all musik, men det gör inget, det finns så mycket musik som jag går igång på att jag klarar mig.
-
Krell'en har/hade bättre både kontroll och upplösning i det nedre registret, Matantz'en kan lätt upplevas lite "grötig" i basen, framför allt om det händer mycket i det registret. Det blir svårare att följa basgångar och det blir också en sämre fysisk upplevelse när basen är så diffus. Det är märkbart bättre driv/punch/umpf i basen med Krell'en och skillnaden på t.ex. Infected Mushroom - "Avratz" är nästan komisk. 3D-känslan är nog ändå den största skillnaden, det saknas lite av den information som levandegör musiken. Jag upplever det lite som en nedskalad poster. Jag sågar definitivt inte Marantz-spelaren, den låter nog minst lika bra som andra spelare i sin klass och den är mekaniskt mycket välbyggd, det är bara det att Krell'en var ganska mycket roligare att lyssna på.
-
Det är dags att jag hör av mig igen, jag såg att det är styvt 6 månader sen sist. Först en tråkig nyhet, min CD-spelare (Krellen) har gett upp. Den blev kanske sur på mig för att den så sällan fick jobba. Nåja, ingen större förlust egentligen, jag har rippat mina CD-skivor och kan spela dem den vägen när/om det behovet finns. Problemet är att det äldsta barnbarnet hade börjat spela CD-skivor i min anläggning och hon gillar inte att spela via surfplattan. En kompis hade en nästan helt oanvänd Matantz SA-15 S1 som bara stod och samlade damm, så jag tog hand om den. Den fungerar mekaniskt perfekt och läser i stort sätt allt som man matar den med (även SACD och gamla hembrända skivor), ljudmässigt har den dock lite övrigt att önska i förhållande till Krellen. Jag har äntligen fått till ett fullt fungerande och användarvänligt system för filspelning utan att ha en PC inblandad och som låter tillräckligt bra till sitt syfte . Efter lite support från @AlfaGTV har jag även fått till presentationen av album och låtar så som jag ville ha det, tack. Jag har länge haft på känn att det är dags att byta ut pickupen, den har ju varit med i många år. Jag tippade på 6-7 år, men det visade sig vara nästan 11 år sedan jag köpte den (2012-12). Efter ett besök på Malmö HiFi-mässa fick jag äntligen tummarna ur..... Det blev en favorit i repris, jag bytte till en ny Lyra Kleos. En Etna stod förvisso högre upp på önskelistan, men priset är lite för högt för mig. Med facit i hand borde jag ha bytt den för länge sedan, det låter betydligt bättre med en helt ny och ospelad pickup än med den gamla inkörda. Den nya är kanske något väl återhållsam/slank i de lägre registren, men jag inbillar mig att det redan har blivit bättre. När detta skrivs har den nya pickupen bara spelat ~6 timmar och jag vill minnas att den gamla inte fick "släppet" förrän efter styvt 50 timmar. Nu har jag tyvärr ingen koll på hur många speltimmar som den gamla pickupen har i bagaget, men sedan jag började registrera det (först med ett räkneverk och sedan med en drifttidsmätning) har den spelat ungefär 1900 timmar. Under de första 3-4 åren har jag inte en susning om hur många timmar den fick jobba, men att det nu var dags för ett byte råder det ingen tvekan om. Inventeringen och registreringen av mina LP-skivor går framåt, men väldigt sakta. Det är ett tidsödande jobb, men förr eller senare är jag i mål. Det blir faktiskt en del skivor som åker ut också, vilket innebär att det kommer att finnas utrymme för nya plattor i framtiden och det ramlar ju in nya skivor hela tiden. +60 skivor har hittills förpassats till återvinningen eller begagnatmarknaden och det är företrädelsevis musik inom genres som 80-tals syntpop och kletig radiopop. Det finns/fanns även en del så kallad seriös/konstmusik och jazz i hyllorna, men skivor som min hjärna inte klarar av att avkoda till något njutbart får också respass. En del av det är njutbart och får givetvis stanna kvar, men det är en del "tut och gnissel" som jag helt enkelt inte klarar av och har jag inte lärt mig att uppskatta den typen av "musik" under alla dessa år (trots att jag verkligen har försökt), så lär jag inte göra det de sista åren heller. I dagsläget finns det inga funderingar på något apparatbyte, jag sitter fortfarande nöjd. Givetvis finns det prylar som hade varit intressanta att testa, men de har oftast en prislapp som gör dem utom räckhåll för mig. Mina små projekt har i stort sätt helt lämnat hifi-sfären och fokus ligger nu mer på helt andra saker, det är bara @calle_jr som håller igång mig på hifi-elektronikens planhalva tack vare sina projekt. Ha nu ett gott avslut på 2023, så hör jag av mig igen.

- 450 replies
-
- 14
-
-
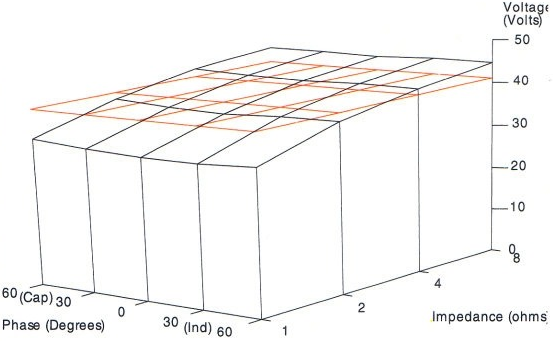
Jag har inte mycket erfarenheter av regeneratorer, men i stort sätt är det ju "bara" en kraftigt förstärkare som matas med en snygg 50Hz sinussignal. Tittar man på förstärkare så finns det de som klarar fasvinklar utan problem och de som inte gör det. Jag lånar några bilder på förstärkarmätningar presenterade med den gamla klassiska effektkuben. Denna förstärkare bryr sig inte om fasvinklar som är mindre än +/- 60°, oavsett last och den påverkas inte speciellt mycket av belastningen heller (vilket motsvarar låg förimpedans) Det är värre med förstärkaren nedan. Denna förstärkare trivs varken med fasvinklar större än 30° eller några stora strömuttag (hög förimpedans) och definitivt inte en kombination av dem. Den hade inte varit lämplig som regenerator enligt mina erfarenheter. Jag har aldrig sett någon komplett mätning av PS Audio's regeneratorer, bara tillverkarens egna siffror och där omnämns inte hur den klarar lite större fasvinklar. En av mina kompisar bor ute på vischan och delar stolptransformator med ett större jordbruk och en mindre bilverkstad. Den dåliga nätkvalitén vid vissa tidpunkter på dygnet omöjliggjorde lyssning så han köpte först en PS Audio P5, men den var för klen för att driva hela hans anläggning så den byttes därför omgående mot en P10. Nu kan han spela både när han vill och hur högt han vill utan problem. Jag har inte mätt fasvinkeln på just hans anläggning, men en av "gubbarna" som jag har besökt har en likadan förstärkare och där mätte jag fasvinkeln till 37°. Jag kan inte påstå att jag upplever någon brist på dynamik i hans anläggning (oavsett volym) så en P10 verkar klara 37° i alla fall.


-
Tack för svaret. DC på nätet orsakar onödig värme i transformatorer och driver transformatorkärnan mer eller mindre mot mättnad med risk för minskad uteffekt som resultat (toroider verkar vara känsligare än lamellkärnor). Nu finns det ju givetvis nyanser även på detta fenomen och så länge transformatorerna är tysta och inte blir onormalt varma så är det kanske inte så mycket att haka upp sig på, det är ju sällan som man utnyttjar maximal uteffekt. Hade jag haft surrande transformatorer och inte kunnat åtgärda rotorsaken, så hade jag inte tvekat att använda en DC-blocker.
-
Det är kul att så många både läser och uppskattar ett inlägg inom ett så här pass "insnöat" ämne. I efterhand ser jag att jag var lite väl kategorisk i min formulering när jag har skrivit "drosselförsedda strömrenare", jag borde ha varit tydligare med att det bara gäller för de drosselförsedda strömrenare som jag har använt i min spaning. (jag har lagt in en notis om detta i inlägget ovan) Det kanske är på sin plats att även presentera resultaten av de mätningar/lyssningar som låg till grund för min slutsats. Jag vill också poängtera att vid samtliga lyssningar har alltid minst anläggningsägaren medverkat (oftast fler) och hans åsikt har vägt tyngst. Hos de 8 systemen (plus mitt eget) som jag besökte så mätte jag upp fasvinklar mellan 28° och 47° och det verkade gå en magisk gräns någonstans vid 35°. Fasvinkelmätningen utfördes med en statisk 300Hz ton och vid 80dB(A) i lyssningsposition. Eftersom fasvinkeln ändras med belastningen så ville jag få ett jämförbart värde. Min mätutrustning är för långsam för att fånga dynamiska värden med tillräcklig precision I de tre anläggningarna med φ < 35° fungerade de båda drosselbaserade strömrenarna bra. Det lät inte nödvändigtvis bättre, men de förlorade ingen (eller försumbart lite) dynamik. I två av anläggningarna var fasvinkeln 36° resp. 37° och där kunde man höra att dynamiken hade minskat något, f.f.a. vid lite högre volym. Två av anläggningar mätte 41° resp. 43° och där var var dynamikförlusten klart hörbar, även vid moderat volym och vid de sista två anläggningarna med 45° resp. 47° blev det en överraskande stor dynamikförlust, "musikdödare" enligt en av lyssnarna. Därav min slutsats/teori. Jag har också försökt få en teknisk förklaring till funktionen i QX-burkarna, men förgäves. QX-serien innehåller inga drosslar och vad jag hittills har fått fram så ska de angripa störningarna genom att inducera en motfassignal för att på så vis släcka ut dem (typ Active Noise Cancelling). Men jag kan ha missförstått den både bristfälliga och "luddiga" informationen som jag har hittat. Kanske @Daniel kan sprida något ljus över saken. Till skillnad mot traditionella s.k. strömrenare så jobbar QX-burkarna bara mot störningar i de högre frekvensbanden (RFI) och har man inte några RFI-störningar på sitt nät, så gör de ingen nytta (men ingen skada heller då de verkar vara helt strömtransparenta). I mitt system är QX-tekniken den enda "strömreningen" som jag har och jag skulle inte vilja vara utan dem. så sant! Det här ämnet är nog närmast outtömligt och för varje dörr som jag lyckas öppna, så hittar jag minst tre nya dörrar och nyfikenheten om vad som finns där bakom kan förvisso störa nattsömnen. De traditionella strömrenarna som jag har använt till denna spaning är förvisso relativt nya, men konstruktionen (modellen) får nog anses vara närmast antik, de har funnits på marknaden i många år. Det finns en uppsjö av strömrenare med CM och DM-drosslar på marknaden och jag har bara testat en bråkdel av dem (och då oftast från den lägre prisklassen <30000:-), det finns troligtvis betydligt "bättre" strömrenare (av den här typen) som kanske klarar av att driva en anläggning med en fasvinkel > 45° utan problem, men det är inte några som jag har haft tillgång till. En välkonstruerad och korrekt dimensionerad DC-blocker borde inte kunna påverka dynamiken negativt. Strömmen ska ju, lite förenklat, bara igenom några dioder. Jag har själv inget behov av någon DC-blocker och har därför aldrig testat någon. Jag vill inte medicinera utan att först konstatera ett problem. Jag har förvisso testat en strömrenare med inbyggd DC-blocker en gång. Den var också drosselbaserad och fungerade inte heller så bra i min anläggning, men det var nog inte DC-blockerns fel. "Surrar" dina transformatorer? Jag undrar eftersom jag har en kompis som valde att installera en DC-blocker eftersom transformatorerna i de båda slutstegen väsnades rejält vissa dagar. Det tog bara 5-10 minuter efter tillslag innan de började de surra ordentligt. Han har aldrig antytt att den skulle ha påverkat dynamiken negativt och hade den gjort det så hade jag garanterat fått höra det. Tyst blev det i alla fall. Jag har samma erfarenhet. Den enda likheten mellan Thor och Isotek verkar vara lådan den bor i.
-
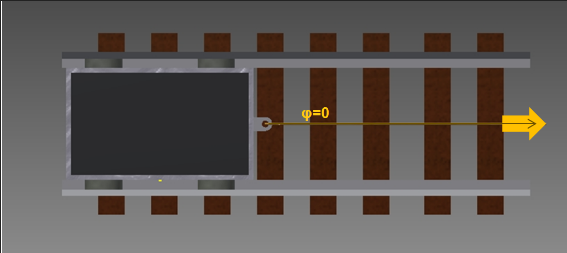
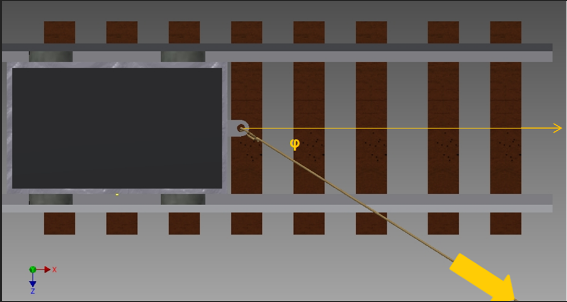
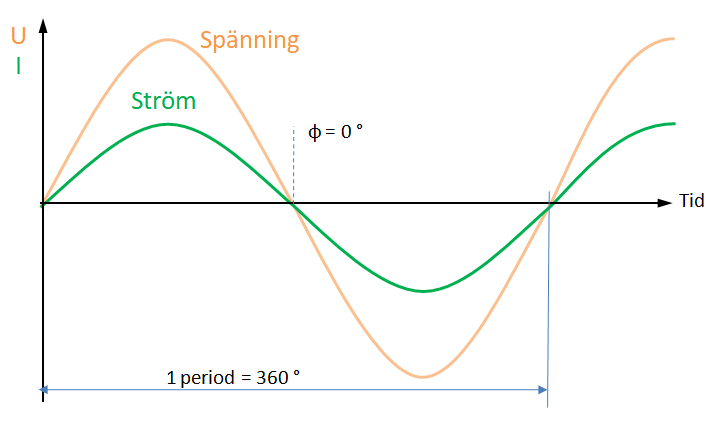
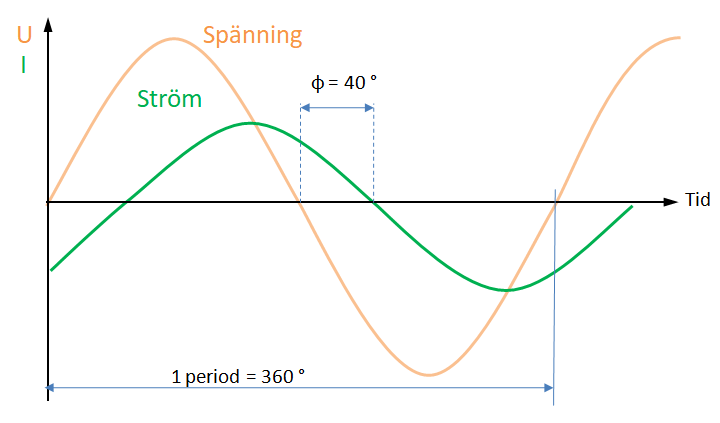
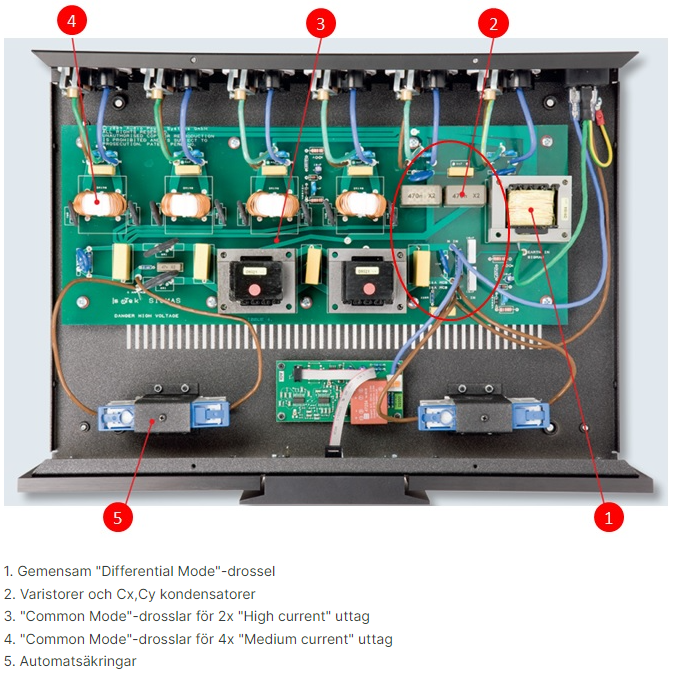
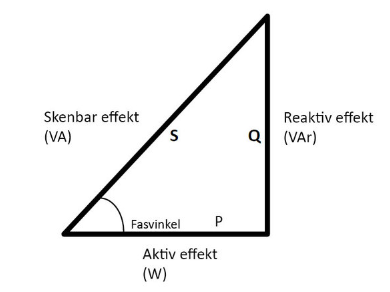
Det här inlägget hör kanske inte hemma under rubriken "det smutsiga nätet", men jag tycker det är onödigt att starta en ny tråd bara för detta och ämnet är till viss del närbesläktat med det som diskuterats tidigare i tråden. Strömrenare anses normalt vara av godo eftersom de filtrerar bort störningar på nätspänningen, men många upplever också en försämrad dynamik med strömrenare och jag har länge funderat över vad som ligger bakom dessa upplevelser och om olika typer av strömrenare har olika stor inverkan på dynamiken. Varför orsakar bara vissa strömrenare dynamikproblem och inte alla ? Varför fungerar samma strömrenare bra i en anläggning och inte i en annan? Jag har därför turnerat runt bland mina hifi-vänner med diverse mätutrustning och fyra olika "strömrenare" i bagaget. Med resultaten från mina mätningar/lyssningar i bagaget har jag till slut lyckats formulera en teori om varför en traditionell s.k. strömrenare (med drosslar) hos den ena gubben kan fungera riktigt bra (utan alltför stora biverkningar), samtidigt som det hos nästa gubbe inte har fungerat alls så bra. Nu kommer jag att bli lite teoretisk, men jag ska försöka göra det så lättsamt och kortfattat som möjligt och förhoppningsvis ska även den oinvigde hänga med. Först några begrepp, enheten skrivs inom( ): U = spänning (V) I = ström (A) P = aktiv effekt (W) Q = reaktiv effekt (VAr) S = skenbar effekt (VA) φ = Fasvinkeln (°) cos (φ) = Effektfaktorn eller PF (Power Factor) Aktiv effekt (P) anges i enheten W Den aktiva effekten är den del som blir till nyttigt arbete i en apparat och om lasten är helt resistiv, typ en "vanlig" glödlampa eller ett värmeelement kan den beräknas med formeln P = U * I, men vid minsta inslag av reaktivt beteende (kapacitivt eller induktivt) måste formeln korrigeras till P = U * I * cosφ (uttalas "cosinus fi" och förklaras nedan). Det är den aktiva effekten som en elmätare registrerar och som abonnenten betalar för. Reaktiv effekt (Q) anges i enheten VAr Den reaktiva effekten är den effekt som tillförs från elnätet men som inte blir till nyttigt arbete i en apparat. Den reaktiva effekten uppstår i induktiva och kapacitiva (reaktiva) laster. Exempel på induktiva laster är transformatorer, motorer och lysrörsarmaturer. Användning av reaktiva laster leder till en förskjutning mellan ström- och spänning (se nedan under rubriken fasförskjutning). Ju större andel skum (reaktiv effekt) i glaset, desto mindre mängd öl (aktiv effekt) blir det till dig. Skenbar effekt (S) anges i enheten VA Den skenbara effekten är den verkliga effekten som en apparat belastar elnätet med. Den beräknas med formeln S = U ∙ I och har enheten VA (voltampere). Det går också att räkna fram den skenbara effekten utifrån den aktiva och reaktiva effekten. Då används formeln S = √(P2 + Q2). Känner ni igen Pythagoras sats? Bilden nedan visar förhållandet av P, Q och S på ett annat sätt. Fasförskjutning (φ) En last (apparat) kan vara antingen resistiv, reaktiv eller en kombination av dessa, den stora skillnaden (i just det här ämnet) är att med en rent resistiv last, d.v.s. en last utan varken induktiva eller kapacitiva inslag, så kommer strömmen att ligga i fas med spänningen och fasvinkeln φ = 0°, (se bilden nedan) Om ström- och spänningskurvan inte sammanfaller, finns det en fasförskjutning. Ju större förskjutning mellan ström och spänning, desto mer skenbar effekt (Q) utvecklas och mängden nyttig effekt (aktiv effekt) minskar. (Ju mer skum det är i glaset, desto mindre öl och desto sämre effekt ger den.) Fasförskjutning sker i alla reaktiva laster och vinkeln på fasförskjutningen anges med den grekiska bokstaven φ (fi). Med en induktiv belastning ligger strömkurvan efter spänningskurvan och vid en kapacitiv belastning ligger strömkurvan före spänningskurvan. Bilden ovan visar förhållandet mellan spänning och ström vid en induktiv last. Strömmen ligger efter spänningen. En helt induktiv eller helt kapacitiv last kommer att ge en fasvinkel på 90°, men den typen av laster är sällsynta, oftast är det en kombination av induktiv/kapacitiv och resistiv last vilket i praktiken kan ge fasförskjutningar någonstans mellan -90° och +90°. I bilden ovan är fasvinkeln φ = -40° (Jag hoppar över polariseringen av fasvinkeln i resten av texten, den spelar ingen roll i det här fallet) - Exempel på produkter som utgör en resitiv last: glödlampor och värmeelement. - Exempel på produkter som utgör en mer eller mindre kapacitiv last: elektroniska transformatorer och kondensatorer. - Exempel på produkter som utgör en mer eller mindre induktiv last: konventionella transformatorer, elmotorer och lysrörsarmaturer. Fasvinkeln innebär lite förenklat att en del "nyttig" effekt omvandlas till "onyttig" reaktiv effekt som inte är till glädje för någon. Ju större fasförskjutningen är mellan spänning och ström, desto mindre nyttig (aktiv) effekt utvecklas i lasten och andelen onödig reaktiv effekt ökar relativt den tillförda effekten (S). Effektfaktorn (cos φ) Effektfaktorn beskriver förhållandet mellan aktiv effekt och skenbar effekt och uttrycks som vinkelfunktionen (cos) av vinkeln φ. Om spänning och ström ligger ur fas med 40° i förhållande till varandra är fasvinkeln φ = 40° och effektfaktorn blir cos(40°) ≈ 0,77. Från kraftleverantörens sida är det önskvärt att effektfaktorn ligger så nära 1 som möjligt (φ = 0°). Jaha, och vad vill jag komma med det här då? Jo, om jag använder min anläggning som exempel så orsakar den en fasförskjutning på 45° (i medel), d.v.s. en effektfaktor på ~0,71, vilket gör att anläggningen drar 1,4 gånger så mycket från nätet relativt det som gör nytta i apparaterna. Allt som ligger i min kraftmatning från nätstationen, matarkabeln, serviskabeln, fastighetens egna installation och en ev. strömrenare är att betrakta som "strömbromsar" och de kommer alltså att behöva hantera 1,4 gånger högre ström än om fasvinkeln hade varit 0°. Om vi tittar på vad fasvinkeln innebär för elförsörjningen. En rent resistiv last (cos φ = 1) motsvarar en rak belastning enligt bilden nedan. Ju större fasvinkel, desto jobbigare blir det att dra. En klen nätmatning (d.v.s. hög förimpedans) och andra saker på vägen som begränsar strömförändringar (typ drosslar) o.s.v. motsvarar att den som drar i snöret får sämre fotfäste och ju större vinkeln är, desto svårare blir det. Jag hoppas inte att jag rörde ihop det för er, det blev ju en del onödigt snack också. Slutsats: (När jag använder begreppet "drosselförsedda strömrenare" menar jag inte alla strömrenare som bygger på den principen, utan bara de som jag har testat, de andra känner jag givetvis inte till beteendet på) Enligt min spaning (som baseras på mina mätningar och lyssningar som har skett i mycket varierande miljöer) så har jag kommit fram till att ju större fasvinkelvinkel, desto sämre verkar de traditionella strömrenarna fungera vad gäller dynamiken. Kombinationen svagt elnät(hög förimpedans), stor fasvinkel (låg effektfaktor) och strömrenare med drosslar, typ .... .... verkar inte vara den optimala kombinationen. I bildexemplet ovan ligger det två drosslar i serie med lasten (1 & 3 eller 4 beroende på uttag), denna typ konstruktion har fungerat bra på anläggningar med φ < 30°, men märkbart sämre vid större fasvinklar. I mina mätningar har jag också konstaterat att fasvinkeln ökar med ökat effektuttag (utom hos en av "gubbarna" som kör med klass-D förstärkare), vilket jag tolkar som en rimlig förklaring till varför dynamiken försämras alltmer ju högre man spelar (med en drosselförsedd strömrenare inkopplad, inte annars). Jag varken kan eller ens vill påstå att detta är en absolut sanning eftersom en mätning/lyssning i nio olika system inte innebär att jag har uppfyllt kraven för signifikans, men samtidigt är mina resultat 100% konsekventa. Ju större fasvinkel som uppmättes, desto större dynamik-påverkan fick den här typen av strömrenare. En anläggning med fasvinkeln < 30° (en effektfaktor > 0,85) lider inte av några påtagliga dynamikbegränsningar med någon av de använda strömrenarna, men med en fasvinkel >45° (en effektfaktor < 0,7) blev det inte alls lyckat med den typ av strömrenare som bilden ovan visar. Jag vill poängtera att jag/vi fick samma resultat med två olika fabrikat av drosselförsedda strömrenare och att det är inte fabrikatet som avgör, det är principen. Den 3:e s.k. strömrenaren som användes orsakade ingen försämring av dynamiken i någon av anläggningarna, men den har heller inte några drosslar i serie med strömmen. Den 4:e typen saknar också drosslar och med den inkopplad kunde vi inte heller höra någon försämrad dynamik. Det är fritt att tolka min spaning som ni vill. Några synpunkter? Är jag helt ute och ? Drar jag förhastade slutsatser? Finns det någon annan parameter som jag inte har beaktat? Nej, jag har inte gett mig på att faskompensera anläggningen (det kanske kommer). Eftersom det inte är lätt för en lekman att kontrollera fasvinkeln själv så gäller fortfarande samma gamla regel, låna hem och prova innan köp. Jag ville bara redovisa vad jag har kommit fram till. //



-
Nu har jag äntligen fått möjlighet att lyssna på denna skapelse och jag är djupt imponerad av vad jag hörde, även i jämförelse med din 810:a (med samma band). Ljudet var öppet och klart med en perfekt tonal balans, extremt dynamiskt och med gott om detaljer. Jag gratulerar till det lyckade resultatet och till ett väl genomfört projekt av en dignitet som få skulle ge sig på, även de med goda elektronikkunskaper i bagaget Tack för demonstrationen. Vad blir nästa utmaning?
-
Sådär ja, nu är NASen fixad. Det tog styvt 20 timmar att göra en rebuild på volymen och man håller andan för att ingen annan disk lägger av under den processen. Jag har förvisso backup på det viktigaste, men det är ganska många TB som jag måste återskapa om det krashar totalt. Jag fick en uppenbarelse om att jag inte har testat DACen rättvist när jag har jämfört den med CD-spelaren. DACen har kopplats till försteget via Nordost Valhalla XLR, CD-spelaren är ansluten via Nordost CAST-kablar och jag vet ju sedan tidigare tester att det skiljer en hel del mellan dessa båda överföringsprinciper. In med en Valhalla XLR mellan CD-spelarens balanserade utgångar och försteget, en S/PDIF-kabel (Nordost Blue Heaven) mellan CD-spelare och DACens coax-ingång, göra en ny nivåkalibrering och så var det dags för test. Det är svårt att sätta ett (för andra) begripligt värde på upplevda skillnader, men enkelt uttryckt så mer än halverades skillnaden mellan CD-spelare och DAC. Nu tappade ljudet från CD-spelaren "gnistan" till ungefär samma nivå som från DACen och det blev i stort sätt likvärdigt i mina öron. Vid filspelning (filer och Minim-server på NAS1, Esoteric Sound Stream och RoPieeeXL) vs CD (via XLR) upplevde jag samma resultat som i föregående test. Skillnaden är inte alls så uppenbar som tidigare. Nästa steg var att än en gång jämföra XLR-kabel vs CAST mellan CD-spelare och försteg. Det har ju hänt en del i anläggningen sen senast jag gjorde det, bl.a. ett nytt försteg och nya högtalare, jag var spänd på resultatet. Det här var snabbt testat. Jag sammanfattar det såhär: Det är synd att inte branschen har nappat på att transportera signalen i strömdomänen istället för som spänning, enligt mig så är CAST överlägset på alla parametrar som jag kan definiera. Slutsats: Det var alltså inte rättvist att testa DACen som jag gjorde tidigare, hade jag bara tänkt lite klarare så hade jag sparat mycket tid, men samtidigt har det varit givande och det har blivit en hel del hifi-umgänge på köpet. Skillnaden mellan CD-spelaren via XLR och Denafrips Ares II (i min installation) är inget som jag hade hakat upp mig på, problemet var att jag jämförde äpple och päron. Den musik som jag har på vinyl kommer fortsättningsvis att avnjutas via det mediet, musik som jag bara har på CD kommer att spelas upp från CD-spelaren och resten kommer att spelas via DACen. Den stora vinsten är att jag nu har fått igång en fungerande filavspelning igen och om jag drabbas av något som sänker mig till den grad att jag inte kommer ur soffan, så kan jag spela ändå. Tack för alla tips.
-
Jag misstänker att du har rätt. Det kanske låter på mig som att det inte låter bra, men det gör det, t.o.m. bättre än vad nätverksmusik någonsin har gjort i min anläggning. Mina kompisar som har varit här och lyssnat håller med och deras slutsats är att RpPieeeXL var det som gjorde störst skillnad följt av att skippa PC/JRiver och jag har fått beställning på tre RoPieee. Exakt, men jag betvivlar att jag hade gjort vågen oavsett vilken DAC som står på hyllan, man måste nog löpa hela linan ut i så fall, inte bara byta DAC. Helt rätt, att tro att jag ska kunna uppnå samma nivå på den digitala avspelningen för en bråkdel av de pengar som bara pickupen kostar är nog befängt, men jag har heller aldrig haft för avsikt att nå dit, jag hade varit helt nöjd om ethernetmusik hade låtit lika bra som samma skiva gör i CD-spelaren. Tyvärr gör det fortfarande inte det. Det här är helt klart användbart, men inget jag väljer att lyssna på om jag har det på CD och är frisk nog att ta mig upp från soffan. Tack! Ja, bara i RoPieeeXL finns det ju fler inställningar att pilla på än på en skivspelare, med det är samtidigt betydligt enklare att testa vad som händer.
-
Jag har nu testat Esoteric Sound Stream också, men jag har inte bestämt mig vad jag tycker ännu, jag gillar egentligen inte någon av dem. Det är för mycket "lullull" och huvudfunktionen (att snabbt och enkelt spela en skiva) drunknar i alla finesser som jag varken behöver eller vill ha. Det är givetvis en vanesak, men jag hittar nog rätt skiva i skivhyllan och har fått igång den innan jag har fått något ljud den här vägen. Ja, det är nog min uppfattning också, för mig var JRiver steget efter WinAmp. ------- Nu har jag testat med att köra fiber mellan Switch1 och Switch4, visst påverkar det (kanske), men absolut inte i den utsträckningen som jag hade hoppats på. Prylarna jag lånade var två TP-Link MC100CM och en 25 m rulle med färdigkontakterad SC-fiber. Det finns troligtvis bättre/roligare saker att bränna krutet på och det här steget väntar jag med till den dagen då det kanske känns mer motiverat. Jag har även fått låna hem en annan leksak. en English Electric 8Switch Denna ersatte Switch4 i min bild ovan och jag började att testa med den kabel som jag normalt använder från Swich1. Det lät som innan. Visst påverkar den kanske något, men definitivt inte i den utsträckningen som jag hade förväntat mig. (Nätdelen är betydligt tystare än den som tillhör Cisco SG250-08, här behövs inget förgående filter) Jag lossade alla andra enheter från switchen så att enbart RoPieeeXL satt kvar, samma resultat som med min Cisco SG250-08, kanske en mikroskopisk skillnad. Nu återstod bara att testa med att mata EE8 via fiber från Switch1, tyvärr blev det ingen större skillnad nu heller. Mitt i alltihop så började telefonen att plinga, en disk i NAS1 hade lagt av. Det är en RAID5 med fyra diskar och jag måste ersätta den trasiga disken innan jag fortsätter. Sammanfattning: Varken galvanisk avskiljning eller en "bättre" switch gjorde några större förbättringar. (Valet av nätaggregat till RoPieeeXL eller val av USB-kabel mellan RoPieeeXL och DAC gör faktiskt en betydligt större skillnad.) Slutsats: Antingen blir det inte så mycket bättre än så här med min DAC och i min anläggning, eller så finns det ett "fel" någonstans i systemet som maskerar mina "tweaks". Det fasta kablaget är vanlig Belkin Cat6 UTP och patchkablarna är en blandad kompott med Cat6 UTP av osexig kontorsmodell. Kan patchkablarna utgöra en så stor flaskhals?
-
I dag har jag "roat" mig med att installera RoPieeeXL på en Raspberry Pi4 (4GB) och mConnectLite på paddan, kul att testa med en annorlunda lösning. Enkel installation och ganska snabbt hade jag ljud från högtalarna. Så här ser det ut: (Volumio'n installerades om till en RoPieeeXL renderer). Först testade jag med mConnect och med Minim-servern på NAS 1 som källa och RoPieeeXL som utenhet. DACen anslöts till RoPieeeXL med samma USB-kabel som jag använt mellan PC och DAC (Nordost Blue Heaven). Att det låter annorlunda än från Windows/JRiver råder det ingen tvekan om, men blev det bättre? Jag spelade några skivor innan jag gick tillbaka till Windows/JRiver för att verifiera. Jag har inte en susning om varför en lösning med en renderer (RoPieeXL i detta fallet) skulle göra någon skillnad, men skillnad är det och det här kommer faktiskt ett steg närmare mitt ideal. Det blir mer flyt i musiken och den blir lite lättare att ta till sig. I mConnect såg jag att jag även kunde välja PC'n som renderer och givetvis testades detta också. Det låter helt klart annorlunda både jämfört med Windows/JRiver och mot RoPieeeXL. Finns det en logisk och tekniskt förankrad förklaring till varför? Tillbaka med RoPieeeXL och jag kopplade ur alla burkar som kunde avvaras från nätverket, bara för att kolla om det gjorde någon skillnad. Nu ligger RoPieeeXL helt ensam på sin egen switch, men jag har inte löst den galvaniska isoleringen mellan switch 1 och 4 ännu och filerna ligger fortfarande kvar på NAS 1. Jaha, infann sig hifi-nirvana nu? Svar, Nej. Jag kunde kanske förnimma någon liten skillnad, men jag är långt ifrån säker. Så enkelt var det inte. Jag ska få låna ett par fiberkonverterare för att isolera switch 4 och jag ska även få låna en EE8 switch över helgen (istället för switch 4) för att se om det gör någon skillnad. Switcharna som jag använder är Cisco SG250-08 och är vanliga skrivbordsswitchar, men samtliga switchar's nätaggregat föregås av ett nätfilter eftersom de skickar mycket skit tillbaka på nätet. Så här mycket "Ethernet-musik" har jag inte konsumerat sammanlagt på många år. Jag återkommer.

-
Tack för tipset, men att prenumerera på en musiktjänst ligger nog långt fram i tiden för min del. Jag tillhör kategorin som vill äga min musik. Fiber? Behövs det en dedicerad NAS till musiken på den switchen också? Jag kör Minim2.2 på båda NASarna, vad är LMS? Jag kan ju testa med den RPi 4 som används till Volumio (frugans webradio), den har en "stöddig" och tyst nätdel (5V, >10A) har du något tips på renderer? Ropeeexl? Appen på paddan är nog det största problemet, jag har hittills inte hittat någon som jag gillar (inkl. mConnect). Jag vill att det ska vara stabilt samt snabbt och enkelt att hitta önskad skiva och inget lullull eller Ads. För min del (nu när jag är på benen igen) är det OK att lyfta röven från soffan, gå till datorn och välja musik. Datorn står alltid igång eftersom jag har min vinyldatabas i den. Finns det något lämplig "fjärr-program" för Windows? Tack för bilden, det finns ju många olika lösningar och det var kul att se hur du har gjort. Problemet att hitta rätt vinylutgåva verkar höra ihop med hur många utgåvor som finns. De flesta skivor som bara har 10-20 alternativa LP-utgåvor brukar lösa sig, men när det är över 150 LP-varianter att välja på är det som bäst 50/50 chans att man hittar någon där allt stämmer. Runout stämmer kanske, men då är det fel färg på etiketten eller fel priskod. Det är en gammal bild, men KCT'n har varit på besök efter det att jag sålde den. Jag ville testa om jag gjorde ett bra val att byta den mot en 202. Det gjorde jag! KCT'n blir lite väl romantisk och "gullig" i min anläggning.
-
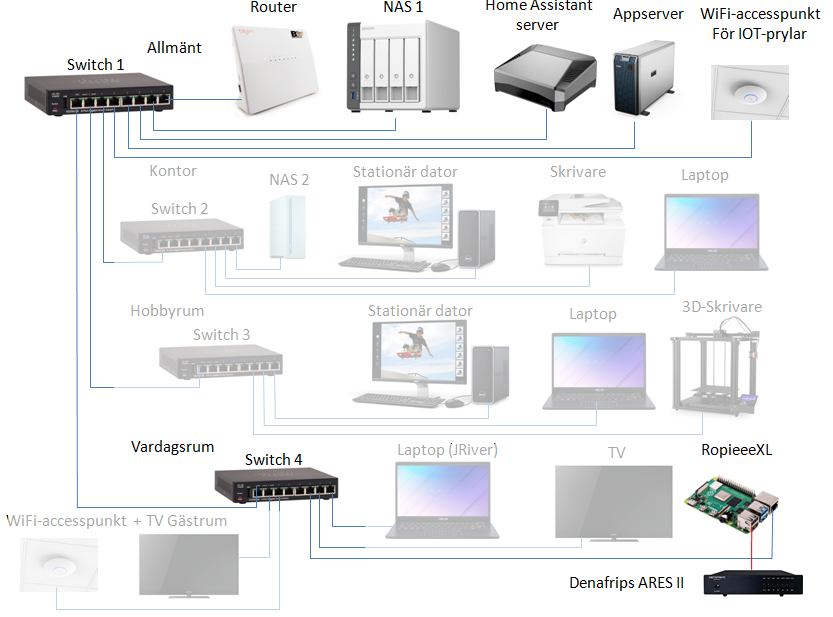
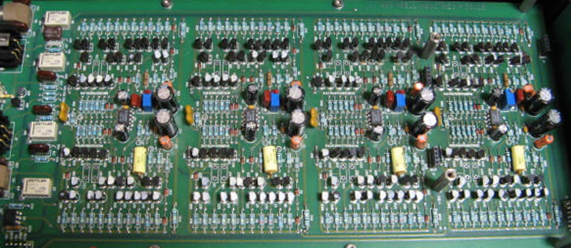
Efter en tuff rond där jag nästan var nere för uträkning håller jag nu så sakteliga att repa mig efter en ondsint och extremt envis lunginflammation (dubbelsidig). Den har resulterat i att jag har varit mer eller mindre utslagen under flera veckor och inte orkat med någonting, knappt andas. Under denna pärs blev nackdelen med fysiska skivor uppenbar, jag orkade nämligen inte ta mig upp från soffan för att kunna spela musik och jag har inget annat alternativ (inte ens en radio). Min gamla DAC (Wadia 121) har (sedan länge) gett upp och jag har därför inte ens brytt mig om att installera JRiver igen efter det datorbyte som skedde för mer än 2 år sedan, men nu hade det varit guld värt att ha en "handikappanpassad" signalkälla. Jag hittade en begagnad DAC till bra pris på nätet, det blev en Denafrips Ares II och när tillräckligt mycket ork infann sig anslöt jag den till laptoppen, installerade JRiver samt en USB-drivrutin till DAC:en och det fungerade för ovanlighetens skull på första försöket. Jag länkade JRiver mot filerna på min NAS och installerade Gizmo på paddan, nu kunde jag ligga kvar i soffan och välja musik. Det var roligt i ungefär 30 minuter, sen stängde jag av, det var inte det här som jag hade saknat. Inte ens i min situation var detta något användbart alternativ. Det fick hellre vara tyst. Jag vill inte påstå att det låter direkt dåligt, problemet är bara att jag inte engageras av musiken, jag började ganska snart surfa på paddan istället och musiken blev bara ett störande moment. Kan inte ens Deep Purple - "Made in Japan" fängsla mig eller få en endaste liten kroppsdel att röra på sig, ja då är kan det lika gärna vara tyst. Jag uppskattar inte skvalmusik som sällskap. En ny DAC verkade alltså vara en onödig "investering". Nu är jag uppe på benen igen och har gjort en del enkla lyssningsjämförelse mellan Denafrips och min CD-spelare. en 20 år gammal Krell KPS28c. CD-spelaren är ansluten via Cast-kablar till försteget och DACen ansluts till försteget via XLR-kablar. Jag anslöt sedan en S/PDIF-kabel mellan CD-spelarens digitalutgång och DACens CO.1-ingång och spelar jag en skiva i CD-spelaren kan jag bara växla ingång på försteget för att jämföra CD-spelarens analoga utsignal med DACens (nivåanpassning +/- 0,25dB gjordes först). Skillnaden är definitivt inte försumbar vid den här jämförelsen. CD-spelaren har betydligt mer luft, dynamik, detaljer, sväng, pondus och f.f.a spelglädje. DACen låter faktiskt ganska tråkig i jämförelse. Denafrips Ares II är basigare än Krellen och jag tror att det tenderar att "gröta ihop" ljudet, men samtidigt är den nog inte värre än min gamla Wadia (jag gick inte igång på den heller). Det är svårt att avgöra efter så lång tid. Jag valde en Denafrips Ares II utan att lyssna på en först eftersom jag hittade en till rätt pris, den har en passande fysisk storlek, den har de anslutningar som jag vill ha och så har den fått väldigt goda recensioner av alla som testat den, men i förhållande till min gamla Krell har den lite övrigt att önska. Jag sågar definitivt inte DACen, man får väl inte mer för de pengarna, men CD-spelaren ligger betydligt närmare mitt ljudideal. Jag har testat DACen med både NOS och med olika uppsamplingsnivåer (och slow/fast-filter), men det gör så lite att det kan kvitta i det stora hela. Jag föredrar dock NOS. Denafrips ARES II är baserad på s.k. R2R arkitektur och Krell KPS28c baseras på två PCM1704-K chip. Det är alltså två helt skilda djur som jämförs, men de ska ju göra samma jobb och därför borde de kunna jämföras på lika villkor. Jag tror att den största skillnaden ligger i analogdelen, inte i D/A-omvandlingen. KRELL'ens analogdel. Nästa test var att mata DACen med FLAC-filer från Windows/JRiver och jämföra med samma skiva i CD-spelaren. Samma tråkiga resultat som innan. (Flac-filerna kommer från samma CD som spelades i CD-spelaren så det går inte att skylla på olika utgåvor) Jag har även här testat med olika översamplingshastighet, med olika filter samt att låta JRiver skicka data som DSD med olika hastighet, men det blev ingen större upphetsning nu heller (DSD vinner dock med en knapp noslängd). Filer spelade från PC'n via USB låter inte likadant som när DACen matas från CD-spelarens digitalsignal och enligt mina värderingar låter det sämre från PC'n. Varför? Soundstage krymper på alla håll och det blir definitivt inte mer engagerande den här vägen. Jag har därför funderat på om en streamer skulle göra så stora förbättringar relativt Windows/JRiver att det är befogat att lägga pengar på det, så jag lånade en Lumin U1 mini av en kompis. (lånad bild) Den gjorde mig inte nämnvärt mycket gladare än Windows/JRiver eller Volumio på en Raspberry PI. Resultatet blev i stort sätt detsamma. Jag lånade även hans DAC och i den jämförelsen föredrar jag helt klart Denafrips Ares II, det är nog inget fel på min DAC vilket jag misstänkte. Hans DAC var den totala motsatsen, hård, kall och riktigt jobbig att lyssna på om man skruvade upp lite. Nu när jag orkar resa mig föredrar jag kombinationen Windows/JRiver och att jag styr musikvalet direkt från PC'n istället för att blanda in en mobil eller padda (för att på så sätt undvika den distraktionen). Vill eller behöver jag av någon anledning styra musikvalet från soffan så kan jag ju göra det. Men varför får jag det här resultatet, många andra verkar ju vara jättenöjda med de här prylarna? Antagligen är det något "fel" i mitt nätverks infrastruktur, eller så sitter felet mellan öronen på mig. (jag tror mig veta vilket, men....) Jag anser mig inte vara någon teknisk analfabet vad gäller nätverk i allmänhet, men det kan ju vara något självklart som jag har missat och som gör att jag aldrig lyckas gå igång på musik som har transporterats över nätverket. Min lokala IT-miljö ser ut så här idag: 73 IP-adresser allokerade, alla prylar har fast IP-adress. (följande "burkar" är anslutna med kabel) 1 Router 4 Switchar 2 NASar (varav en med diverse tjänster typ: DLNA, minim, PLEX,,,,) 1 HomeAssistant-server 2 Accesspunkter 2 Stationära datorer 3 Laptop's 1 Appserver med FTP-server, SQL-server, InfluxDB-server (Time Series Database) och en Broker (en typ av server för MQTT-kommunikation från/till IOT-prylar) 1 OctoPrintControlServer till 3D-skrivaren 1 Nätverksskrivare 2 Nätverksansluta TV 1 Mediaspelare (Volumio) (och via via WiFi) 48 så kallade IOT-prylar för styrning/övervakning av hemmet och för datainsamling om t.ex. el-nätets kondition (alla via egen accesspunkt). I det "vanliga" WLANet finns bara våra två mobiler, en padda för allmän förströelse och frugans laptop (totalt 4 klienter). Normal nätverksbelastning för IOT-trafiken är < 5% och topparna är 7-8% , 75% av trafiken från IOT-prylarna ska till/från appservern. 1-2% av detta ska skickas vidare till NAS 1 och resterande ska direkt till/från HomeAssistant servern. Samtliga av dessa prylar bor under samma switch. Det är många paket som skickas, men de är väldigt små. Lumin U1 Mini anslöts till Switch 4 och jag har provat att hämta flack-filerna från både NAS 1 och NAS 2, jag har t.o.m. flyttat NAS 2 till Switch 4, men utan hörbar skillnad. Jag har säkert glömt några "burkar", men ser någon något uppenbart fel i mitt nätverk som kan vara anledningen? (Routern är Bahnhof's, men borde inte spela någon roll eftersom ingen musikdata passerar den.) Några tips? Jag var klart överoptimistisk när jag började med detta projekt och jag har lagt ner alla förhoppningar om att bli klar under 2023. Det här tar betydligt längre tid än vad jag hade räknat med och det är så in i h....e tråkigt att jag oftast lyckas hitta något annat som är roligare att sysselsätta mig med, t.ex. tömma diskmaskinen, putsa fönster, tvätta bilen eller vika tvätt. Problemet är att Discogs saknar alldeles för många av mina utgåvor vilket gör att sökandet tar väldigt lång tid och allt alldeles för ofta utan resultat. Hade jag bara hittat rätt utgåva hade jag nog kunnat motivera mig att lägga över en timme på vissa skivor, men det är alldeles för ofta som jag får gå hem tomhänt. Exempel: Jag har 15 skivor med David Bowie och efter styvt 20 timmars frenetiskt sökande på Discogs kom jag fram till att 11 av mina 15 utgåvor inte fanns registrerade där. Med de första 100 skivorna blev kvoten 74 hittade / 26 bom, med nästföljande 100 skivor blev den 78/22. (t.o.m.SMHI har bättre träffbild) Nu tycker säkert någon duktig vän av ordning att jag ska sluta gnälla och lägga till de saknade utgåvorna i Discogs databas i stället, men det har jag varken tid eller lust med. Jag blir ju aldrig klar om jag ska engagera mig i det också och jag gillar inte attityden som råder där bland "proffsen", jag har försökt, men jag gav upp. Så viktigt är det inte, jag ska ju inte lägga ut skivorna till försäljning, jag vill bara vara snäll mot nästa generation. Efter styvt 2 månader har jag klarat av 1/12 av skivorna, det lutar alltså åt att bli minst ett 2-års projekt istället (om jag inte ger upp innan dess, vill säga). Hur många av er använder discogs för att hålla koll på skivsamlingen? Har bara jag otur, eller ser det ut så här för er också? Jag nappade på @AlfaGTV's förslag och vi är nu ett gäng som har har träffats några gånger för att äta gott, diskutera hobbyrelaterade frågor, spela musik och kanske t.o.m. smutta på en liten virre. Det har gjort nytta, hifi-umgänget med likasinnade och tips på ny musik hjälpte mig på traven. En liten nytändning. Tack för tipset. Jag återkommer om/när något nytt händer.



- 450 replies
-
- 13
-
-
Så där, nu har det (på dagen) gått ett år sen sist jag hörde av mig. Jag börjar med det mest övergripande, jag har blivit pensionär! Det borde ju innebära att jag har betydligt fler av dygnets timmar till förfogande, men dagarna försvinner lika snabbt som innan och jag förvånas dagligen över hur jag tidigare hann med att jobba också. Några av er träffade jag på mässan i Göteborg och några har jag kontakt med via PM, Email eller i.r.l., men för övrigt håller jag en fortsatt låg profil. Jag tittar in på Euphonia emellanåt och kollar vad som avhandlas och till min glädje ser jag att min artikel om "Det smutsiga nätet" fortfarande omnämns. Det är extra kul när ett alster i ett så knaster-torrt ämne har gett ett bestående och mestadels positivt avtryck. Anläggningen ser i stort sätt ut som senast jag skrev. Vissa av prylarna har blivit utsatta för jämförande tester, men de gamla står fortfarande kvar. Visst har jag hittat prylar som möjligen låter lite bättre (eller åtminstone positivt annorlunda) än de befintliga, men prislappen gör att det inte är lika roligt längre. För mig handlar dock inte Hifi-hobbyn bara om själva apparaterna, att optimera anläggning utifrån de förutsättningar som gäller hos mig, d.v.s. att "tweaka" har varit minst lika givande. Tyvärr verkar även den processen ha nått fram till ändhållplatsen. Just tweak-delen har varit både lärorik och resultatgivande (samt extremt nyttigt när man ibland tvingas omvärdera sina djupt rotade fördomar), men de mest intressanta tweaken har tagit slut och jag tror faktiskt inte att jag har så mycket mer att hämta där heller. Jag läste detta för ett tag sedan, en något märklig inställning i min värld, med det är självklart upp till var och en. Om det med tweeks (som i ovanstående citat) menas pluralformen av tweak d.v.s. [optimera, justera, finslipa, vrida, anpassa] (enligt mina uppslagsverk) så är det för mig en helt logisk förlängning av hobbyn och egentligen bara ett sätt att förvalta sin "investering". Ingen (och jag vill betona, INGEN) konstruktör/tillverkare vet hur det ser ut hemma hos mig eller vilka förutsättningar som råder här och de bygger därför saker som ska passa hyfsat bra överallt, men som troligtvis inte presterar optimalt någonstans. Exempel: Valet av apparatfötter bör ju göras utifrån de förutsättningar som gäller hos användaren, inte hos tillverkaren. Det "ansvaret" anser jag ligger hos slutkonsumenten och vågar man bara tulla lite på sina djupt ingrodda fördomar och släppa lite på övertron att tillverkaren alltid vet bäst, så kan man oftast lyfta en redan bra anläggning ett par rejäla snäpp med relativt enkla medel. Har man testat men ändå inte hör någon skillnad, ja då är det ju bara att återställa, men att det inte skulle behövas någon som helst anpassning/optimering/justering/finslipning någonstans i en hel ljudanläggning ställer jag mig ytterst tveksam till. Inte minst vad gäller strömförsörjningen, kablar och kabel/apparat-placeringar (vilket även inkluderar möbler och fötter). Jag har länge hävdat att mitt hifi och mitt musikintresse har gått hand i hand och att båda har varit lika viktiga för mig, den teorin kan jag bekräfta nu. Nu när min hifiresa verkar ha nått sin slutstation så dog själva hifi-intresset och det drog även med sig musiklyssningen i fallet. Under 2022 har skivspelaren bara snurrat 121 timmar (mot 474 timmar under 2021), så lite speltid har jag nog aldrig haft tidigare (inte ens som småbarnsförälder), CD-spelaren har knappast använts överhuvudtaget och streaming/filspelning existerar fortfarande inte i min värld. 2022 var även ett lågvattenmärke för antalet nyinköpta skivor, 37 skivor på ett helt år är långt under vad det brukar bli. Även den inspirationen har alltså svalnat. När själva hifi-intresset dog blev det helt andra saker som engagerar mig, men tyvärr är det inte mycket av det som inkluderar musiklyssning, snarare tvärtom. Jag har helt enkelt förpassat musiklyssningen till några väl valda tillfällen och däremellan är det tyst. När hifi-intresset (d.v.s tekniken bakom avspelningen) frodades genererade det många tillfällen då något skulle testas/utvärderas och som i sin tur genererade många timmars lyssning, även helt utan en tanke på tekniken. En liten förändring/förbättring kunde trigga åtskilliga timmars lyssning. Man kan enkelt säga att hifi-intresset var som en katalysator för musiklyssningen. Vad kan jag då göra för att hålla hifi-grytan kokande? Tips mottages tacksamt. Jag har mina skivor dokumenterade i en hemsnickrad databas, men tyvärr är det inte alltid rätt utgåva som är angiven, så därför är det bara att börja från början och med Discogs som underlag försöka hitta rätt utgåva. En perfekt pensionärssyssla kan tyckas, men fan va' tråkigt det är. Jag vill samtidigt ha ordning på min skivsamling, inte minst för att underlätta för nästa generation och då är det ju bara att ta tag i det. Orkar jag bara med 10 skivor om dagen så blir jag klar under 2023. Jag önskar alla en god fortsättning på det nya året.
- 450 replies
-
- 17
-
-
-
Jag antydde lite löst att jag kanske skulle återvända om/när det blir myggfritt, men det kommer nog inte att bli så. Oavsett vilket, så har det blivit lite av en tradition att jag börjar det nya året med en resumé av det föregående och jag gör så även i år. Musik & Hifi-intresset är fortfarande på topp, nyfikenheten har inte sinat och mina experiment/tester pågår med oförändrad kraft, det är egentligen bara min motivation att engagera mig publikt som har sinat. Det är fortfarande en övervägande majoritet av musiken som kommer från vinyl. Lite onödig, men ändå rolig statistik. Under 2021: snurrade skivspelaren i 474,2 timmar (och jag stänger t.o.m. av den vid sid/skivbyte). har det tvättats 242 skivor med Degritter'n och antalet stiger snabbt. Jag är fortfarande extremt nöjd med den. förbrukade anläggningen 2218 kWh. var den högsta förbrukade (aktiva) effekten under spelning 2887 W (medelvärdet under 10 sekunder) var den högsta registrerade strömförbrukningen 18,8 A fluktuerade nätspänningen mellan 217,22 - 241,89 V och frekvensen mellan 48,88 - 50,91 Hz (medelvärdet under 10 sekunder) har THD varierat mellan 0,9 - 2,2% (medel 1,3%) och består nästan bara av 3:e och 5:e överton. Jag har helt sluppit förekomsten av 4:e överton och den 6:e ligger mer eller mindre konstant på 0,1 %. Jag vill passa på att tacka @Amatören för att han fick mig att inse det absurda i att ägna så mycket av min fritid på ett forum istället för att att umgås med familjen, med mina vänner, lyssna på musik eller att fördjupa mig i några av mina övriga intressen. Att skriva, fixa med bilder, rita illustrationer mm. för att sedan försöka koka ihop dessa ingredienser till en smaklig och förhoppningsvis lättuggad anrättning är kanske enkelt för många, men så är det inte för mig. Det tar mig ganska mycket tid i anspråk, formuleringar ska vägas, bilder ska vara illustrativa, data ska verifieras plus att de ska presenteras på ett begripligt sätt och inte minst ska anrättningen kryddas pedagogiskt på ett vis som gör att den passar de flesta runt bordet. Jag vill också be om alla ursäkt för att jag "mulnade" till tidigare, men jag köper verkligen inte när någon klampar in och spottar i min gryta. Mina nerlagda timmar var bevisligen ingenting värda och min motivation att bedriva soppkök (utfodra andra utan egen vinning) försvann snabbare än en löning. Det spelar ingen roll att personen i fråga hävdar att det är humor (sarkasm, ironi och förlöjligande av andra är INTE humor enligt mig), gränsen för vad jag accepterar passerades och oavsett antalet emoji's på slutet visar det ändå på en attityd som jag verkligen föraktar. Jag har därför valt att lägga ner mina aktiviteter här tillsvidare. Jag har ju faktiskt inget att förlora på det, snarare tvärtom. Med facit i hand har det (tack vare detta) blivit åtskilligt fler timmar till förfogande, tid som jag annars hade lagt på forumet. Jag har tagit upp och slutfört några avsomnade projekt, startat några nya och planerar för ytterligare några spännande utmaningar inför framtiden. Jag lider definitivt ingen brist på andra saker att engagera mig i. Och nu till ämnet HiFi: Det har testats några olika hifi-objekt under hösten/vintern, en s.k. Power Conditioner med inbyggd DC-blocker, en Power-regenerator, en integrerad förstärkare i tungviktsklass (med inbyggd riaa och DAC), ett RIAA-steg i toppsegmentet (åtminstone prismässigt), ett exklusivt rörbaserat försteg, några betydligt modernare DAC:ar än min gamla Wadia, en hypad streamer/DAC som kostar >100 ggr mer än min befintliga Raspberry Pi och även några svindyra strömkablar (av ett tidigare otestat fabrikat). Jag vill tacka all berörda för lånen, ingen nämnd och ingen glömd, men eftersom inget av ovanstående objekt gjorde så stort avtryck att det föranledde ett byte (eller ens en fundering på det), så låter jag bli att kommentera och namnge dem. Det var nog allt. Jag avslutar med en liten glimt av framtiden. Pensionen närmar sig snabbt (bara några månader kvar) och därmed får jag förhoppningsvis ytterligare några fler timmar per dag för fria aktiviteter. Det är få saker i livet som jag har längtat så mycket till, som att slippa gå till jobbet. Jag vantrivs absolut inte med mina arbetsuppgifter eller mina arbetskamrater, jag är bara så förbannat trött på det. Jag har ju annat och framför allt betydligt roligare saker att göra än att jobba. Nu får nästa generation ta över. Planerna är att använda den extra tiden till att försöka lära mig så mycket som möjligt av de saker som jag aldrig har hunnit sätta tänderna i tidigare och då gäller det att sätta fart innan hjärnan förtvinar. Jag tycker mig nämligen se ganska tydliga tendenser på att man blir allt mer inskränkt i sitt tänkande med åren och att skygglapparna dras åt mer och mer för var år som går och jag känner många människor som tidigare hade ett klart, fritt och öppet sinne men som har blivit rejält trångsinta på gamla dar och de lägger betydligt mer tid/energi på att (med en terrier's envishet) försvara sina gamla invanda värderingar, än att öppna nya dörrar. Om det är bristande nyfikenhet (d.v.s. ointresse), bekvämlighet (man slipper ju tänka) eller något medicinskt, det vet jag inte, men jag hoppas innerligt att jag inte smittas av det än på många år. Blotta tanken på det tillståndet skrämmer mig. Tack för ordet. Ha nu ett gott liv, det tänker jag försöka ha. /PEO
- 450 replies
-
- 20
-
-
-